Come i robot possono orientarsi in modo efficiente dal punto di vista energetico
Per potersi muovere autonomamente nello spazio, i robot devono essere in grado di stimare dove si trovano e come si stanno muovendo. Finora questo era possibile solo con un grande sforzo di calcolo e di energia. Un team di ricerca che comprende la ricercatrice della ZHAW Yulia Sandamirskaya ha ora sviluppato un nuovo tipo di soluzione ad alta efficienza energetica e ne ha dimostrato l'applicabilità a un compito robotico reale. I risultati sono stati pubblicati sulla famosa rivista Nature Machine Intelligence.





Anche animali piccoli come le api, che hanno meno di un milione di neuroni, possono orientarsi facilmente in ambienti complessi. Utilizzano i segnali visivi per stimare il proprio movimento e tracciare la propria posizione rispetto a luoghi importanti. Questa capacità è chiamata odometria visiva. In termini di compattezza ed efficienza energetica, la soluzione utilizzata dagli animali non ha nulla da invidiare alle migliori soluzioni tecniche attuali per i robot. Tuttavia, per rendere possibili nuove applicazioni come piccoli droni autonomi o occhiali leggeri per la realtà aumentata, l'efficienza energetica deve essere migliorata in modo massiccio.
Costruito secondo l'esempio delle reti neurali naturali
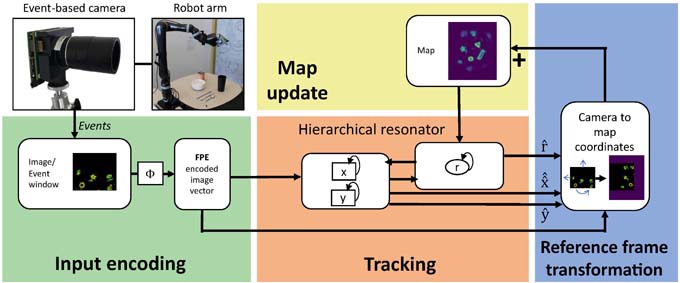
Nel lavoro pubblicato su Nature Machine Intelligence, un team internazionale di autori propone una nuova soluzione neuromorfica, modellata sulle reti neurali naturali, che può anche essere implementata in modo efficiente nell'hardware neuromorfico. I risultati presentati rappresentano un passo importante verso l'utilizzo di hardware neuromorfico per l'odometria visiva veloce ed efficiente dal punto di vista energetico e per il compito associato di localizzazione e mappatura simultanea. I ricercatori hanno convalidato sperimentalmente questo approccio in un semplice compito robotico e sono stati in grado di dimostrare con un set di dati basati su eventi che le prestazioni sono allo stato dell'arte.
Più trasparenza nell'IA
La grande differenza rispetto all'IA di oggi, come quella utilizzata da ChatGTP, è che il metodo descritto può mettere insieme o smontare vari componenti di una scena visiva per creare una composizione. I componenti includono informazioni come "Quali oggetti ci sono?" o "Dove si trovano?" e molte altre. Nelle reti neurali convenzionali, questi componenti sono mescolati insieme e non possono essere separati. Il nuovo metodo ci riesce. Questo è fondamentale per sviluppare sistemi di intelligenza artificiale modulari e, soprattutto, trasparenti.