

Les robots peuvent ainsi s'orienter de manière efficace sur le plan énergétique
Pour que les robots puissent se déplacer de manière autonome dans l'espace, ils doivent pouvoir estimer où ils se trouvent et comment ils se déplacent. Jusqu'à présent, cela n'était possible qu'au prix de gros efforts de calcul et d'une grande consommation d'énergie. Une équipe de recherche, à laquelle participe la chercheuse de la ZHAW Yulia Sandamirskaya, a développé une nouvelle solution peu gourmande en énergie et démontré son applicabilité à une tâche robotique réelle. Les résultats ont été publiés dans la célèbre revue spécialisée Nature Machine Intelligence.





Même les petits animaux comme les abeilles, qui disposent de moins d'un million de neurones, peuvent facilement s'orienter dans des environnements complexes. Pour ce faire, ils utilisent des signaux visuels pour évaluer leurs propres mouvements et suivre leur position par rapport à des lieux importants. Cette capacité est appelée odométrie visuelle. En termes de compacité et d'efficacité énergétique, la solution utilisée par les animaux est inégalée par rapport aux meilleures solutions techniques actuelles pour les robots. Mais pour que de nouvelles applications telles que les petits drones autonomes ou les lunettes légères de réalité augmentée deviennent possibles, l'efficacité énergétique doit être massivement améliorée.
Construit selon l'exemple des réseaux neuronaux naturels
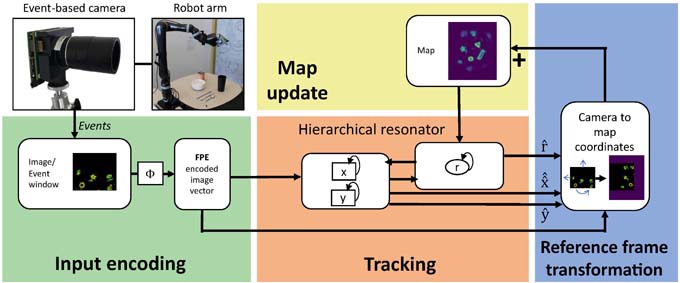
Dans ces travaux, publiés dans Nature Machine Intelligence, une équipe internationale d'auteurs propose une nouvelle solution neuromorphique, c'est-à-dire construite sur le modèle des réseaux neuronaux naturels, qui peut également être implémentée efficacement dans du matériel neuromorphique. Les résultats présentés constituent une étape importante vers l'utilisation de matériel informatique neuromorphique pour l'odométrie visuelle rapide et peu gourmande en énergie, ainsi que pour la tâche de localisation et de cartographie simultanées qui en découle. Les chercheurs ont validé expérimentalement cette approche dans une tâche robotique simple et ont pu montrer, à l'aide d'un ensemble de données basées sur des événements, que la performance correspond à l'état de l'art dans ce domaine.
Plus de transparence dans l'IA
La grande différence avec l'IA actuelle, telle qu'elle est utilisée par exemple par ChatGTP, réside dans le fait que la méthode décrite peut assembler ou désassembler différents composants d'une scène visuelle en une composition. Ces composants sont des informations telles que "Quels objets s'y trouvent ?" ou "Où se trouvent-ils ?" et bien d'autres encore. Dans les réseaux neuronaux conventionnels, ces composants sont mélangés et ne peuvent pas être démêlés. La nouvelle méthode le peut. Ceci est d'une importance capitale pour développer des systèmes d'IA modulaires et surtout également transparents.


